Robin Newman’s Lego© Mindstorms© Page A beginner’s journey
Now with 7 fully documented projects to make. LATEST UPDATE 3 May 2014
Most of my videos are also on youtube here

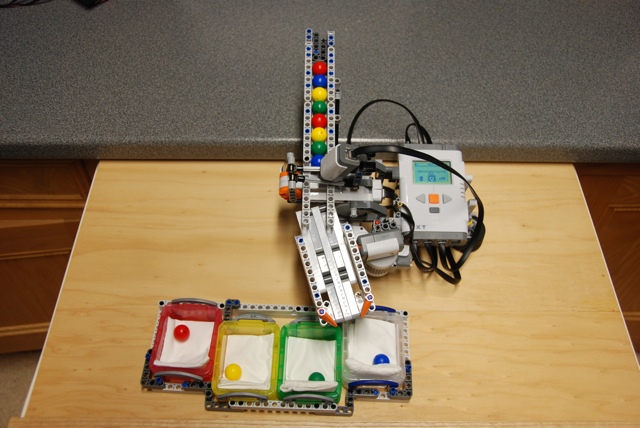
Version1 Colour Ball Sorting Robot Arm, using parts from 8547 and 9648 sets, togeher with a turntable part 48452cx1
Version 2 Colour Ball Sorting Robot using parts solely from 8547 NXT 2 set.
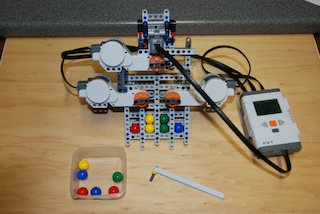
Version 3 Colour Ball Sorting Robot using parts solely from 8547 NXT 2 set. This version is based on a project video I saw on youtube.

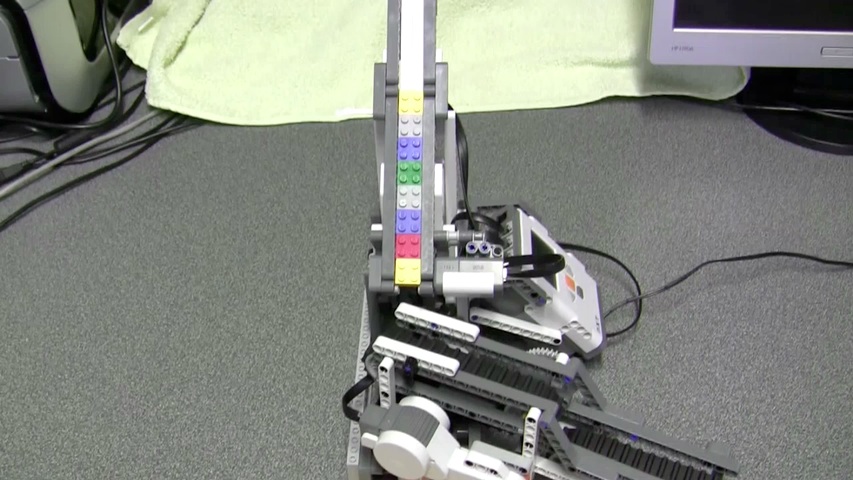
Version 4 Colour Ball Sorting Robot using parts solely from 8547 NXT 2 set. This version is mobile on a tracked base!
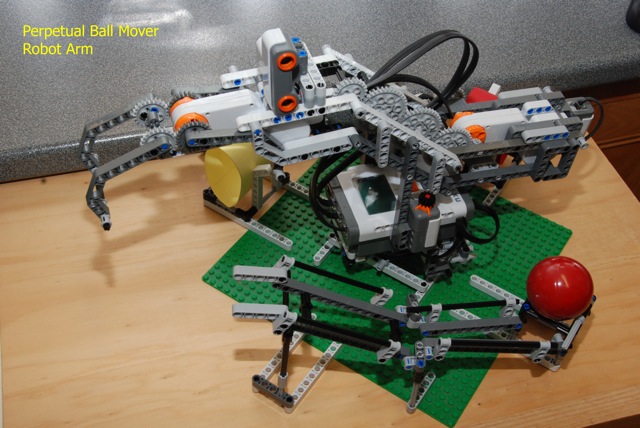
Perpetual Ball Mover Robot Arm, using parts from 8547 NXT 2 set, and 9648 set together with a turntable part 48452cx1, and an extra 15 beam, two extra 24 tooth gearwheels, a 52mm Lego Ball, the whole mounted on a 32 x 32 stud green Lego base tile.
Project 6 based on a Belt Driven Colour Brick Sorter found on internet

Project 7 kleekbots version of project 4 coloursorter
Colour Sorter 1
In January I acquired my first Lego Mindstorm set. After much deliberation I decided to buy the Nxt 2 8547 set. However I also wanted to be able to build models produced by the previous Nxt 1 8527 set, so I decided to purchase in addition the Education Resource Set 9648. Finally I also purchased some additional components from BrickLink including a turntable part 48452cx1.
With these parts, I spent the last two months working through most of the models on the excellent nxtprograms.com site. I also tried all the bonus models from the 8547 and 8627 sets together with Hans Andersson's sudoku solver tiltedtwister.com/sudokusolver.html (which I couldn't get working satisfactorily) and Philo's fast colour sorter philohome.com/fbs/fbs.htm (which I could!).
Eventually I decided to launch out and try and design my own models. In deciding what to build, I wanted to build a static model, rather than one on wheels. This was because of limited floor space, and also, I find that sometimes you don't appreciate the control that is taking place on say a line follower, where the changes are rapid and small (if it works well) and you can't really see what is going on. I had enjoyed building Philo's fast colour sorter, although I found it a bit precarious and easy to knock the balls out of place. Also it performed so rapidly that each "run" was soon over.
I decided to build my own colour sorter, and spent a couple of days designing the hardware and then some time on programming it. I liked Philo's gate mechanism of two oscillating rods used to release the balls, and started by modifying this so that the colour sensor was placed between the two rods, rather than after the lower rod. This then allowed me to detect the ball colour and use a rotating arm on a turntable to deliver each ball to the appropriate receptacle. I found the design process quite taxing. The gate assembly itself was quite simple. More interesting was how to attach a touch sensor to it to stop the gate in exactly the right position. The turntable base assembly was also fairly straightforward. However supporting the ball track and gate assembly at a suitable angle was more demanding, and took some time to work out. The model was constructed using components from both the 8547 and 9648 sets and also requires the turntable (which is included in the nxt 1.0 8527 set). A full parts list is included in the build instructions. A video of the completed model in action (version 1) is here
Build instructions including parts list, and a zip file of the programs for this version can be downloaded from the links on the left.
Eventually though the model was complete, and I began the programming process. I was more at home with this, having worked as an IT teacher for many years before my retirement.
It is suggested that you download the programs and load them into Mindstorms editor to follow the ensuing discussion. Note you will need the software from Nxt 2 to handle the colour sensor. more...